雷达数据处理中的跟踪算法及其在3D打印服务中的整体应用框架
本文旨在探讨雷达数据处理中的核心跟踪算法技术,并构建其在3D打印服务领域的整体应用目录框架,揭示跨领域技术融合的潜力与价值。
第一部分:雷达数据处理中的跟踪算法
雷达数据处理的核心目标是从含有噪声和杂波的原始回波中,持续、稳定地估计出目标的运动状态(如位置、速度)。跟踪算法是实现这一目标的关键。
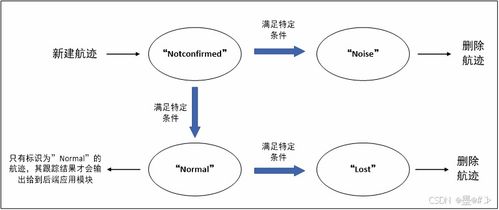
- 基础概念:跟踪通常分为点迹-航迹关联(将当前探测点与已有目标轨迹匹配)和滤波预测(估计目标未来状态)两大步骤。
- 经典算法:
- 最近邻域法(NN):简单直接,适用于稀疏目标环境。
- 卡尔曼滤波器(KF)及其变种(如扩展卡尔曼滤波EKF、无迹卡尔曼滤波UKF):利用线性/非线性系统模型和高斯噪声假设,进行最优或次优估计,是跟踪的基石。
- 多假设跟踪(MHT):在密集或交叉目标环境下,能维持多个关联假设,延迟决策以提高准确性,但计算复杂。
- 概率数据关联滤波器(PDAF)与联合概率数据关联滤波器(JPDAF):适用于单目标/多目标在杂波中的跟踪,通过概率加权处理关联的不确定性。
- 粒子滤波器(PF):基于蒙特卡洛方法,适用于高度非线性和非高斯系统,但计算量较大。
- 现代发展:当前研究热点包括基于深度学习的跟踪(利用神经网络进行特征提取和关联)、多传感器信息融合跟踪以及针对高超音速、高机动目标的先进自适应算法。
第二部分:整体应用框架——从雷达数据到3D打印服务的跨领域目录
将雷达的感知、跟踪能力与3D打印的快速成型、定制化制造能力相结合,可以构建一个创新的技术服务体系。以下是一个整体的概念性目录框架:
模块一:数据感知与采集层
1.1 雷达传感器网络部署:用于监控特定区域(如工厂车间、仓储空间、基础设施)。
1.2 多目标动态跟踪:利用上述跟踪算法,实时获取监控区域内物体(如AGV小车、人员、设备部件)的精确三维位置、轨迹和运动状态。
1.3 环境与形变监测:对大型结构(如定制化3D打印的建筑构件)进行形变、振动等状态的持续跟踪监测。
模块二:数据处理与建模层
2.1 轨迹数据解析与行为分析:分析目标的运动模式,用于优化生产流程或安全预警。
2.2 “跟踪到模型”转换:这是核心创新点。将雷达持续跟踪获得的物体运动学数据或形变数据,转化为可用于3D打印的数字化模型参数。
* 例如:跟踪一个机械臂末端的运动轨迹,直接生成描述该轨迹的复杂三维管道或支撑结构模型。
- 例如:监测到某结构件的微变形,反向生成一个用于加固补偿的、与之精准贴合的反向模型。
2.3 模型修复与优化:对转换生成的模型进行可打印性检查和结构优化。
模块三:3D打印服务与应用层
3.1 按需即时制造:基于实时跟踪触发的需求,自动启动3D打印任务。
* 应用场景:跟踪发现某设备零件磨损或位移,立即打印替换件或校准件。
3.2 定制化工装与夹具:跟踪生产线工人或装配流程,为其打印最符合人体工学或特定装配步骤的定制工具。
3.3 动态环境适配打印:根据雷达对安装空间的实时扫描和跟踪数据,打印出与不规则环境完全匹配的构件(如管道支架、装饰面板)。
3.4 功能梯度结构打印:利用跟踪获得的结构应力、热分布数据,指导3D打印过程中材料密度和属性的梯度变化,实现性能最优化。
模块四:系统集成与反馈层
4.1 闭环控制系统:将3D打印出的实体放回雷达监控环境,跟踪其性能和行为,形成“感知-跟踪-建模-打印-验证”的闭环。
4.2 服务门户与接口:为用户提供基于雷达监测报告的3D打印解决方案订购、状态跟踪服务。
结论
雷达数据处理中的跟踪算法,从本质上是对动态世界进行精确、连续的数字孪生构建。而3D打印则是将数字模型快速物化为实体。将二者通过“跟踪驱动建模”这一桥梁进行整合,有望开创一个全新的智能制造与服务体系。该整体目录框架描绘了从实时感知到物理制造的无缝衔接愿景,在高端制造、智能运维、快速响应保障等领域具有广阔的应用前景。技术实现的关键在于高效的算法、精准的数据-模型转换接口以及跨领域的系统集成能力。
如若转载,请注明出处:http://www.zzzcvip.com/product/58.html
更新时间:2026-04-14 02:17:15